3Blue1Brown_线代本质第六章:逆矩阵,列空间与零空间
【注:本章笔记是第六章加附注二的笔记,也就是《逆矩阵,列空间与零空间》加《非方阵》。】
3Blue1Brown_线代本质第六章:逆矩阵,列空间与零空间
- 我开始了3蓝1棕的线性代数本质的学习,我没什么基础所以在此做了笔记,这里是第六章打卡,学习永远不怕晚哈!如有问题请各位大佬及时指正!
- 在b站它的链接在此。
- 官方一共将此系列分为12节,所以我也会分开写。
- 我会把相关的这一系列笔记链接在每一篇的最下面,写完就会更新,有需要的朋友可以自行跳转!
- 这就是普通的记录,比较基础,没什么有新意的地方。厉害的大佬或相关专业的大佬可以自行跳过此笔记!
✏️逆矩阵(Inverse Matrices):
✍️矩阵的用途:
- 操纵空间,并且线性代数几乎在所有技术领域都有体现。
- 它能帮助我们求解特定的方程组。
- 如果一个特定的方程里面它只存在常数和未知变量(没有幂,没有奇怪的函数,没有未知量间的乘积等等),我们整理这个方程组,将未知量放在左边,常数项放在右边;如果能对其未知变量就更好(必要情况下添加系数0);此时,就被称为“线性方程组”(Linear system of equations)
- 此时我们可以将此整合成一个含有常数系数和未知变量的矩阵,以及他们乘积所得到的一个常数向量。
- (注意:此时先将范围限制在方程数目与未知量数目相等的情况内)
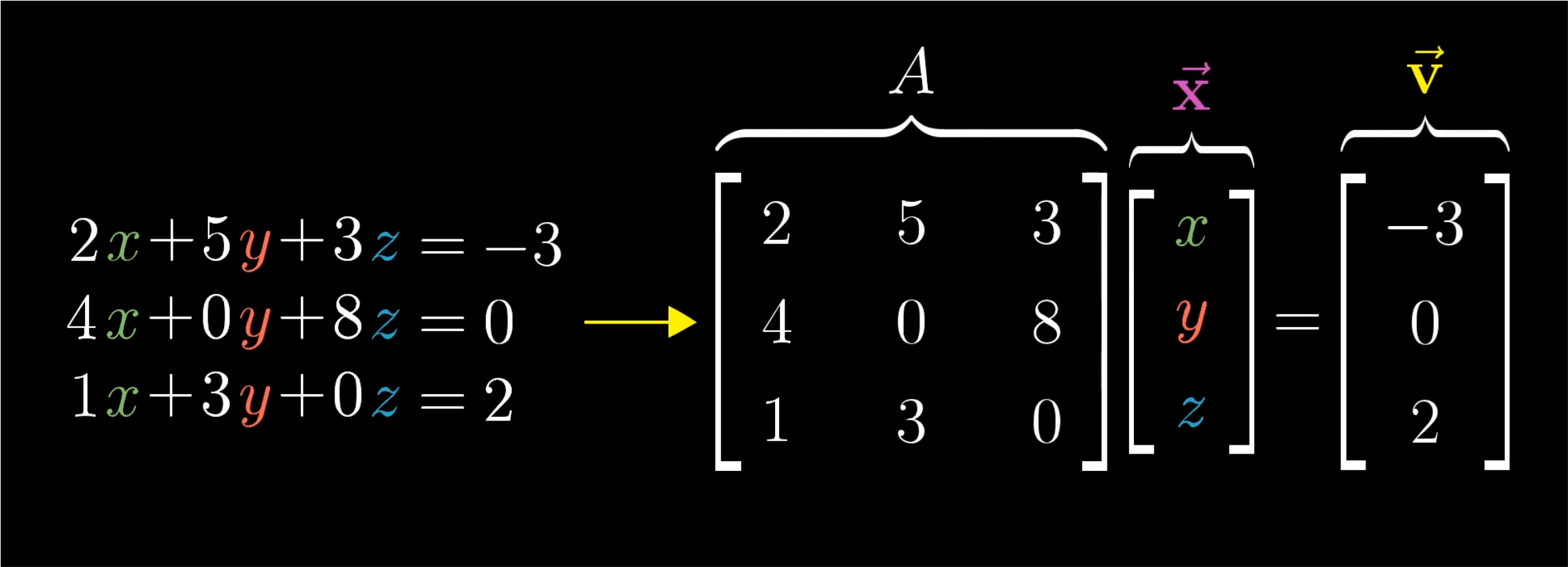
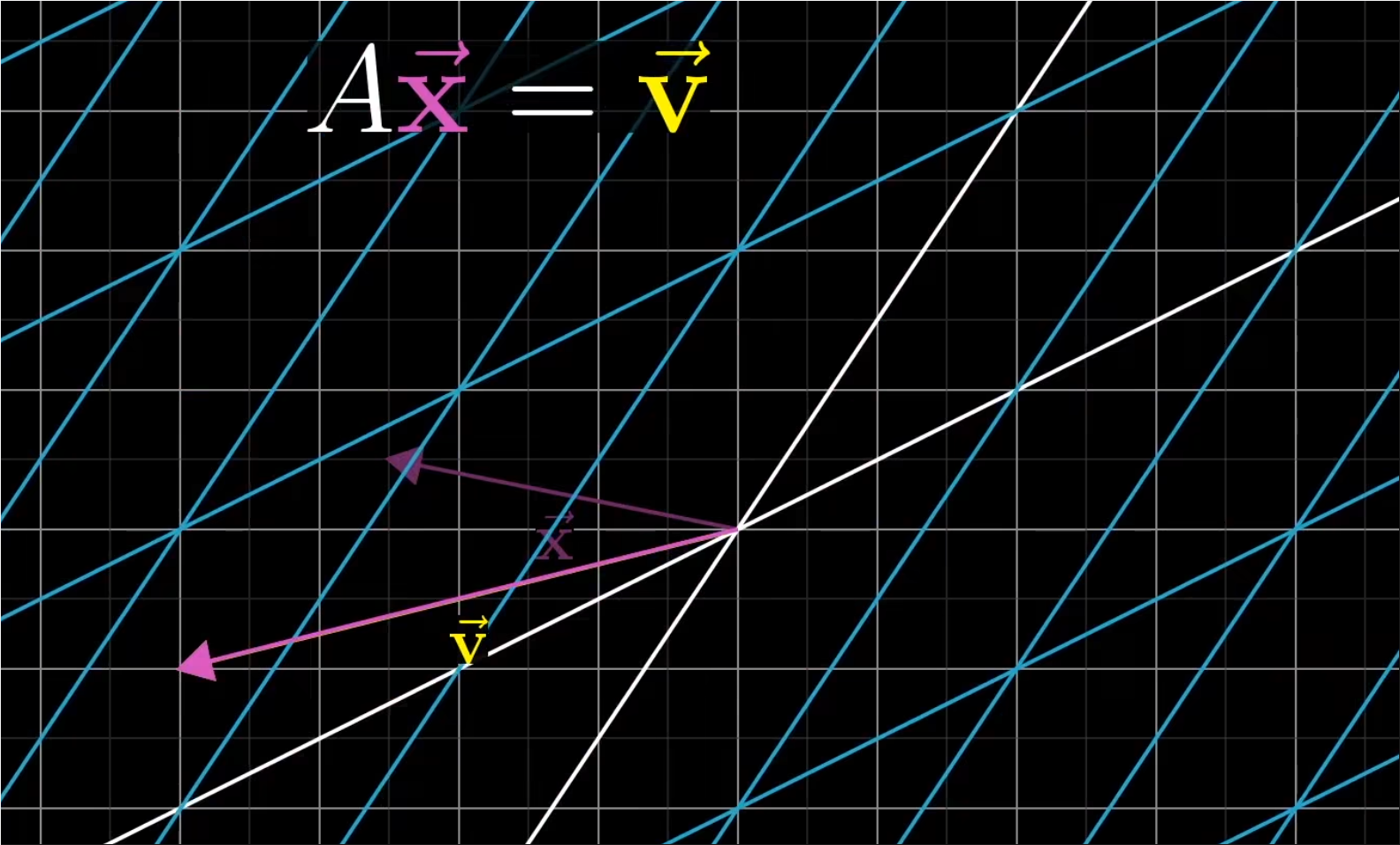
- 如上图,我们称系数矩阵为A,包含未知数的向量为粗体x,右侧的常数向量为v。这不仅仅是将方程组写进一行的书写技巧,它还阐明了这个问题中优美的几何直观部分。
- 矩阵A代表一种线性变换,所以求解Ax=v意味着我们去寻找一个向量x,使得它在变换后与v重合。
- 所以求解此方程组,我们完全可以只考虑对空间的变换,以及变换后向量的重叠。
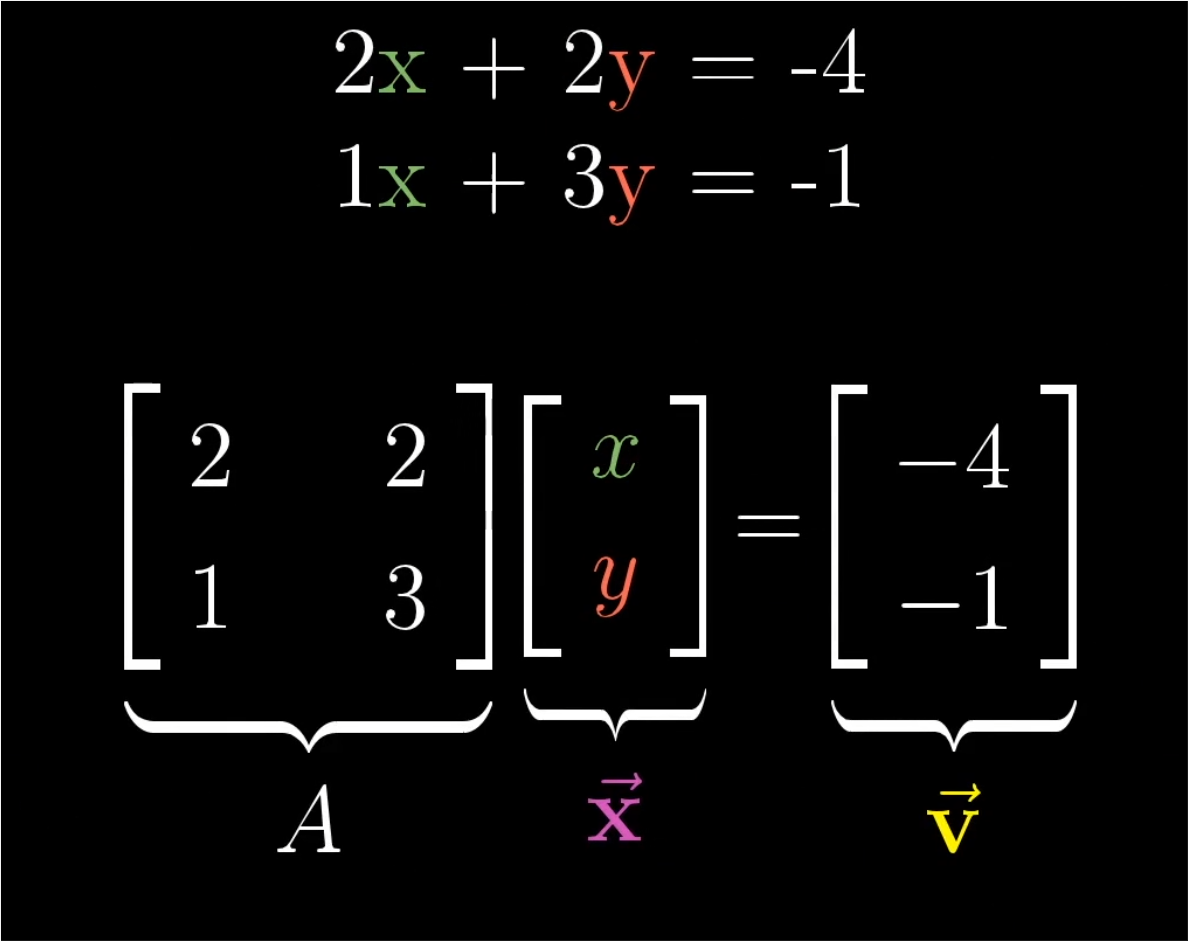
- 现在上图这个含有两个未知量构成的方程组,它的解依赖于矩阵A所代表的变换。
- 将空间挤压到一条线或一个点等低维空间,A保持空间为2维。
- 我们将它们分为两种情况:
- A的行列式为0。
- A的行列式不为0。
A的行列式不为0的情况:
- 这种情况下,有且只有一个向量在变换后与v重合,并且可以通过逆向进行变换来找到这个向量。如同倒带一样,通过跟踪v的动向,就能找到满足Ax=v的向量x。
- 当你逆向进行变换时,它实际上对应了另一个线性变换,通常被称为“A的逆”,记为A^(-1)。
- 这个过程在几何上就对应与逆向进行变换并跟踪v的动向。

- 随机选一个矩阵,有很大的可能会遇到这一非零行列式的情况。也就是说,对于两个未知量和两个方程所构成的方程组存在它唯一的解。
- 当方程树木与未知量数目相同时,这一思想在高维情况下也有意义。同样也可以给方程组赋予几何意义。
- 只要保证A不将空间挤压到一个更低的维度,那么就是A的行列式不为零的情况,那他就存在逆变换(A逆)。这使得应用A变换在应用A逆变换之后,结果恒等。
A的行列式为0的情况:
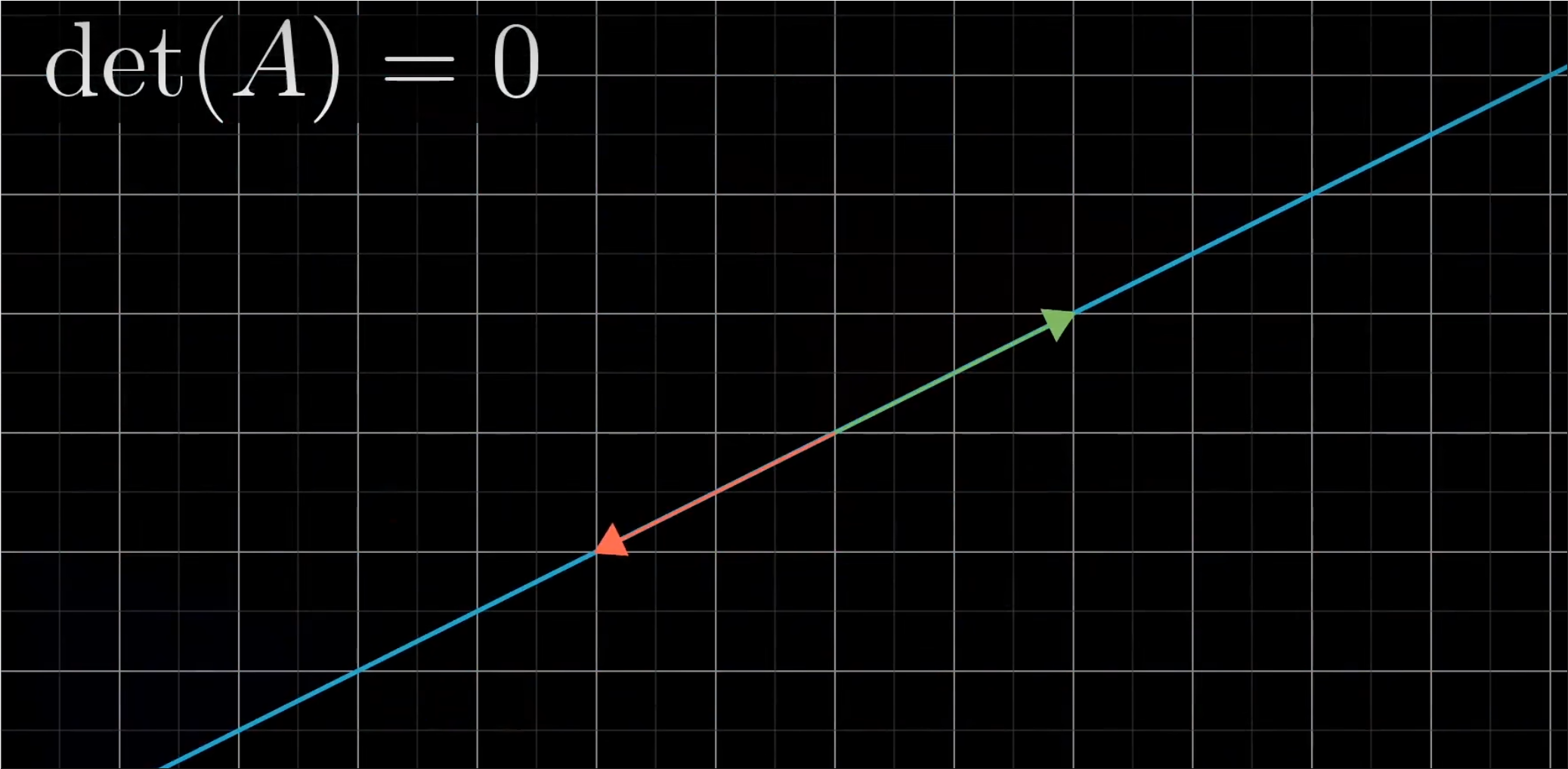
- 这个方程组相关的变换会压缩到更低的维度。
- 此时不存在逆变换,函数无法将一条线变换回一个平面。
- 此时的解依旧存在,向量v很可能恰好处于这条线上。三维空间时,解的存在难度就会更高。
✏️秩(rank):
- 当变换结果为一条直线时,也就是说结果是一维的,我们称这个变换的秩为1(Rank1)。
- 如果变换后的向量落在某个二维平面上,我们称这个变换的秩为2(Rank2)。
- 所以说“秩”代表着变换后空间的维数。
- 所以说对于2x2的矩阵,它的秩最大为2,意味着基向量仍旧能张成整个二维空间,并且矩阵的行列式不为0。
- 如果对于3x3矩阵来说,秩为2的时候意味着空间被压缩了,和秩为1的情况下相比较,压缩的并不是那么严重。
- 如果一个三维变换的行列式不为0,变换结果仍旧充满整个三维空间,那么它的秩为3。
✏️列空间(Column Space):

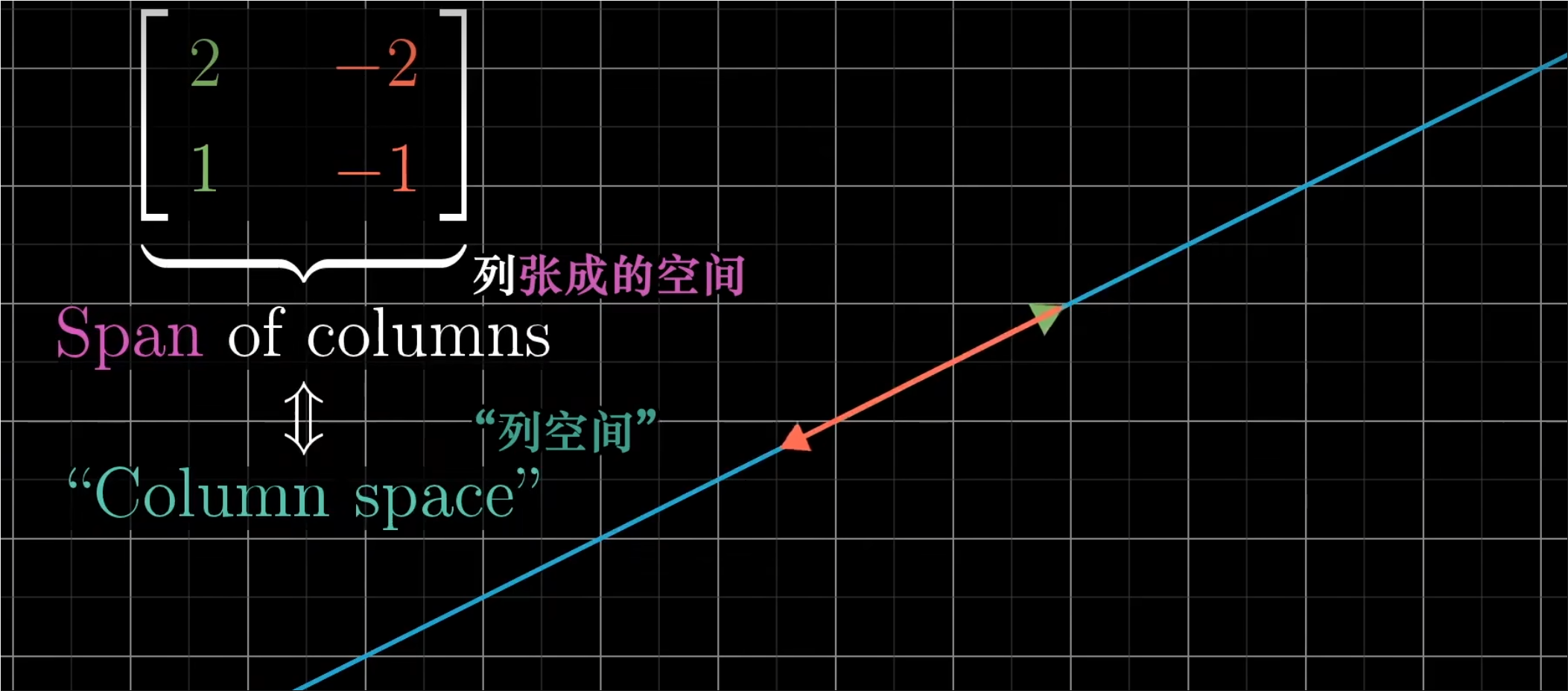
- 无论是一条直线,一个平面还是三维空间,所有可能变换结果的集合被称为矩阵的“列空间”(Column Space)。
- 这个来源很简单,矩阵的列告诉你基向量变换后的位置。这些变换后的基向量张成的空间就是所有可能的变换结果。换句话说,列空间就是矩阵的列所张成的空间。
- 所以更精确的说,秩的定义是列空间的维数。
- 当秩达到最大值时,意味着秩与列数相等,我们称之为“满秩”(Full Rank)
✍️零空间(Null space):
- 需要注意的是,零向量一定会被包含在列空间中,因为线性变换必须保证原点位置不变。
- 对于一个满秩变换来说,唯一能在变换后落在原点的就是零向量(0,0)自身。
- 但是对于一个非满秩的矩阵来说,他将空间压缩到一个更低的维度上,也就是说会有一系列向量在变换后成为零向量(被压缩的空间的有一部分会部分归到0向量)。
- 这被称为矩阵的“零空间”(Null Space)或“核”(Kernel)。
- 变换后的一些向量落在零向量上,而“零空间”正式这些向量所构成的空间。
- 对线性方程组来说,当向量v恰好为零向量时,零空间给出的就是这个向量方程所有可能的解。
✏️总结:
每个方程组都有一个线性变换与之联系。
当逆变换存在时,你就能用这个逆变换求解方程组。
列空间的概念让我们清楚什么时候存在解什么时候不存在。
零空间的概念有助于我们理解所有可能的解的集合。
✏️附注二:
✍️非方阵(Nonsquare Matrices):
- 在之前的学习中,使用的几乎都是2x2或者3x3这样的方形矩阵来举例子,但现在需要讨论一下非方阵。
- 讨论不同维数之间的变换是完全合理的,比如一个二维向量到三位向量的变换。
- 同之前一样,如果网格线保持平行且等距分布,并且原点映射为自身,就称它为线性的。
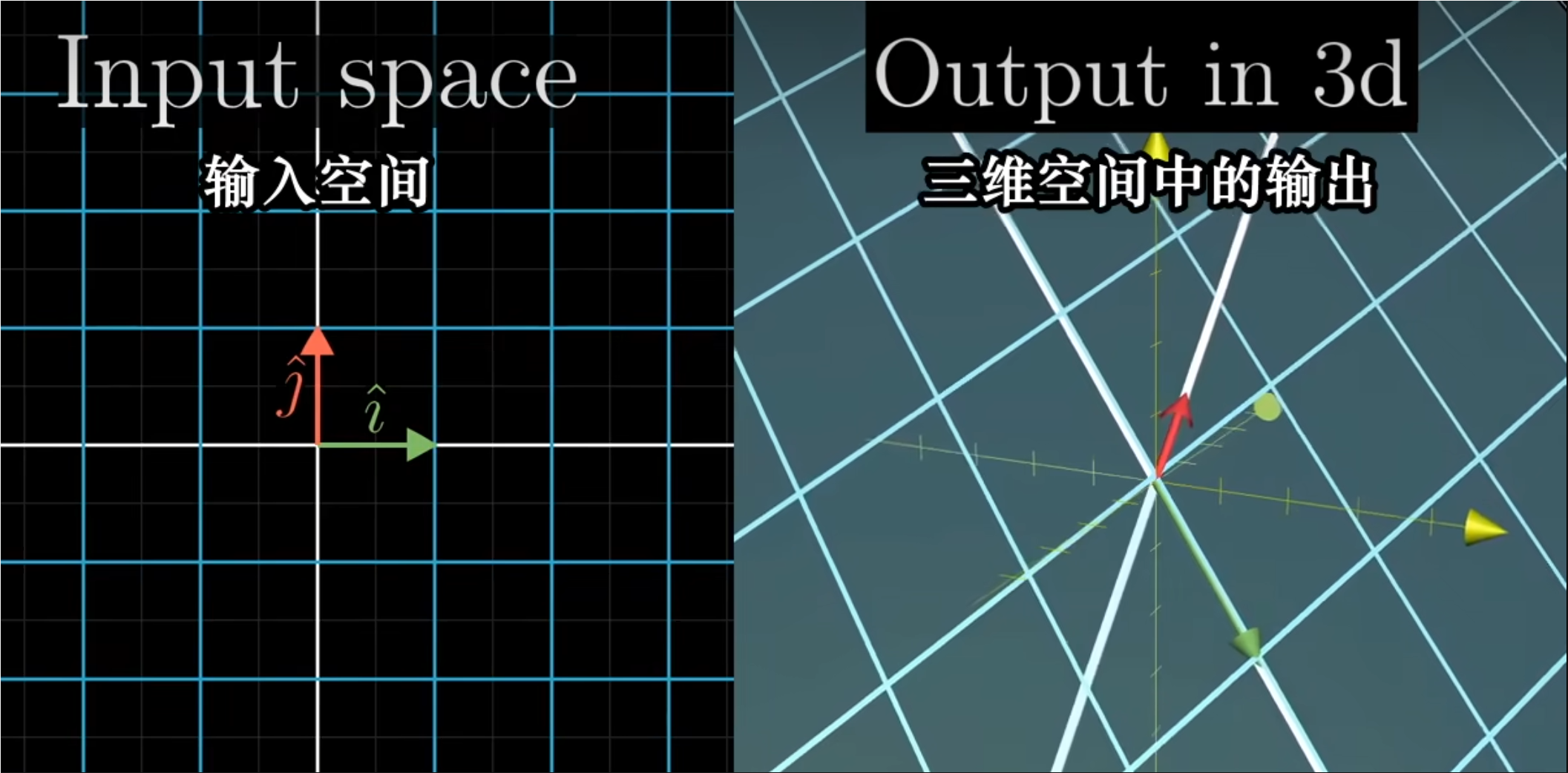
- 此时要注意的是,由上图所示,输入的二维向量与输出的三维向量是完全不同的物种,他们生活在没有任何关联的空间当中。
3x2矩阵:
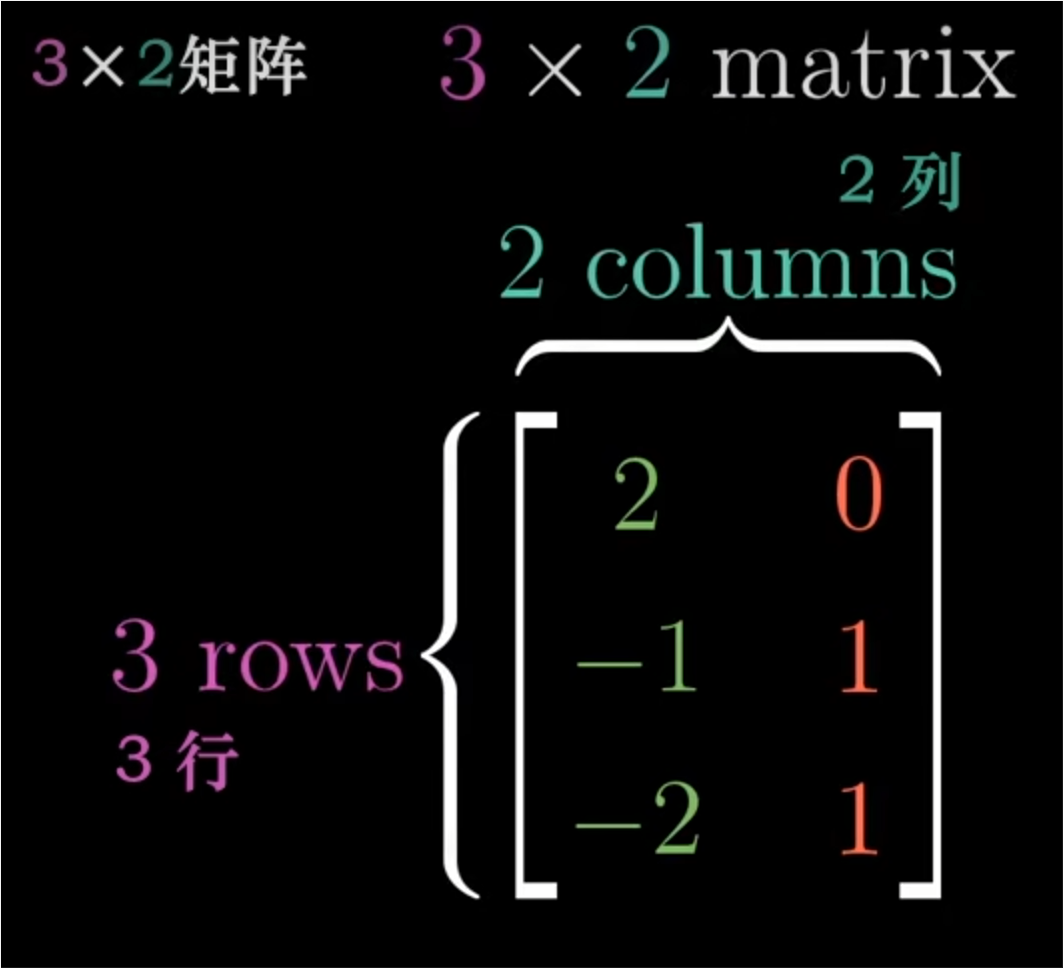
- 用矩阵代表这样一个变换则和之前相同;找到每一个基向量变换后的位置,然后把基向量的坐标作为矩阵的列。如下图所示。
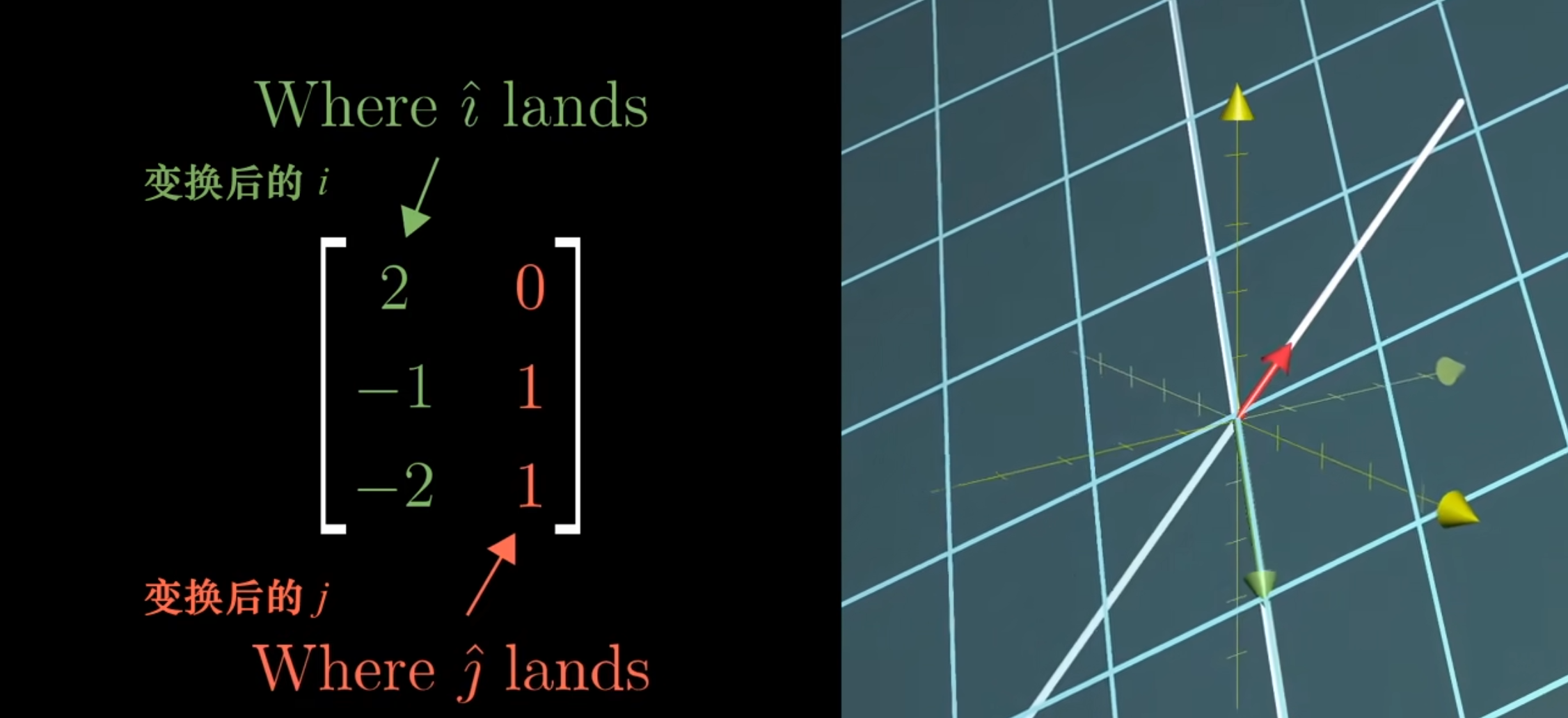
- 注意一点,这意味着代表这个变换的矩阵是三行两列,也就是3x2矩阵。这个矩阵的列空间是三维空间中一个过原点的二维平面,但是这个矩阵任然是满秩的。因为列空间的维数与输入空间的维数相等。
- 它的几何意义是将二维空间映射到三维空间上,因为矩阵有两列表面输入空间有两个基向量,有三行表明每个基向量在变换后都用三个独立的坐标来表示。
2x3矩阵:
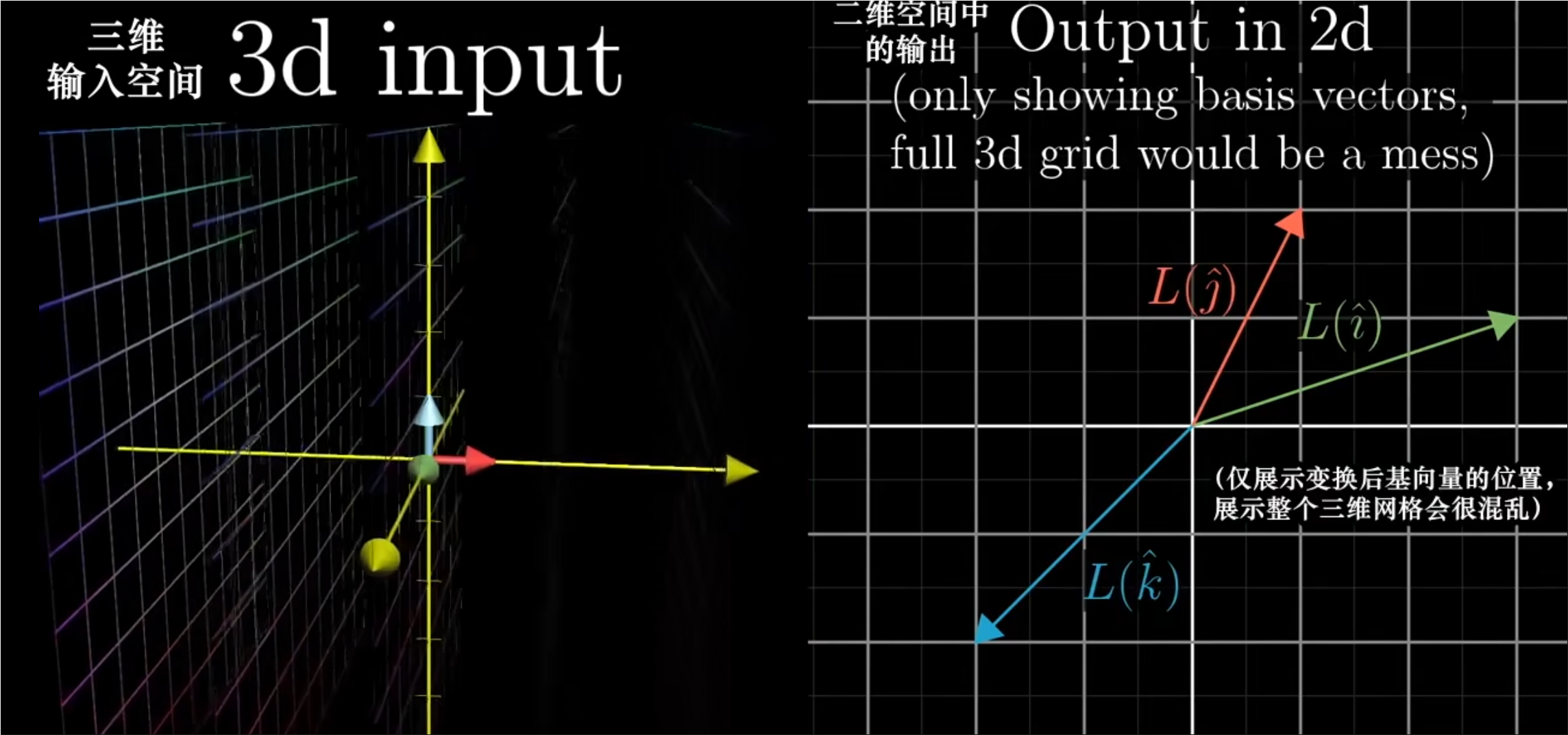
- 类似的,当我们看见一个两行三列也就是2x3矩阵时,表面矩阵有三个基向量,也就是说原始空间是三维的;每个变换后的基向量用两个坐标来表示,所以他们一定落在二维空间。因此这是一个从三维空间到二维空间的变换。如下图所示例。
1x2矩阵:
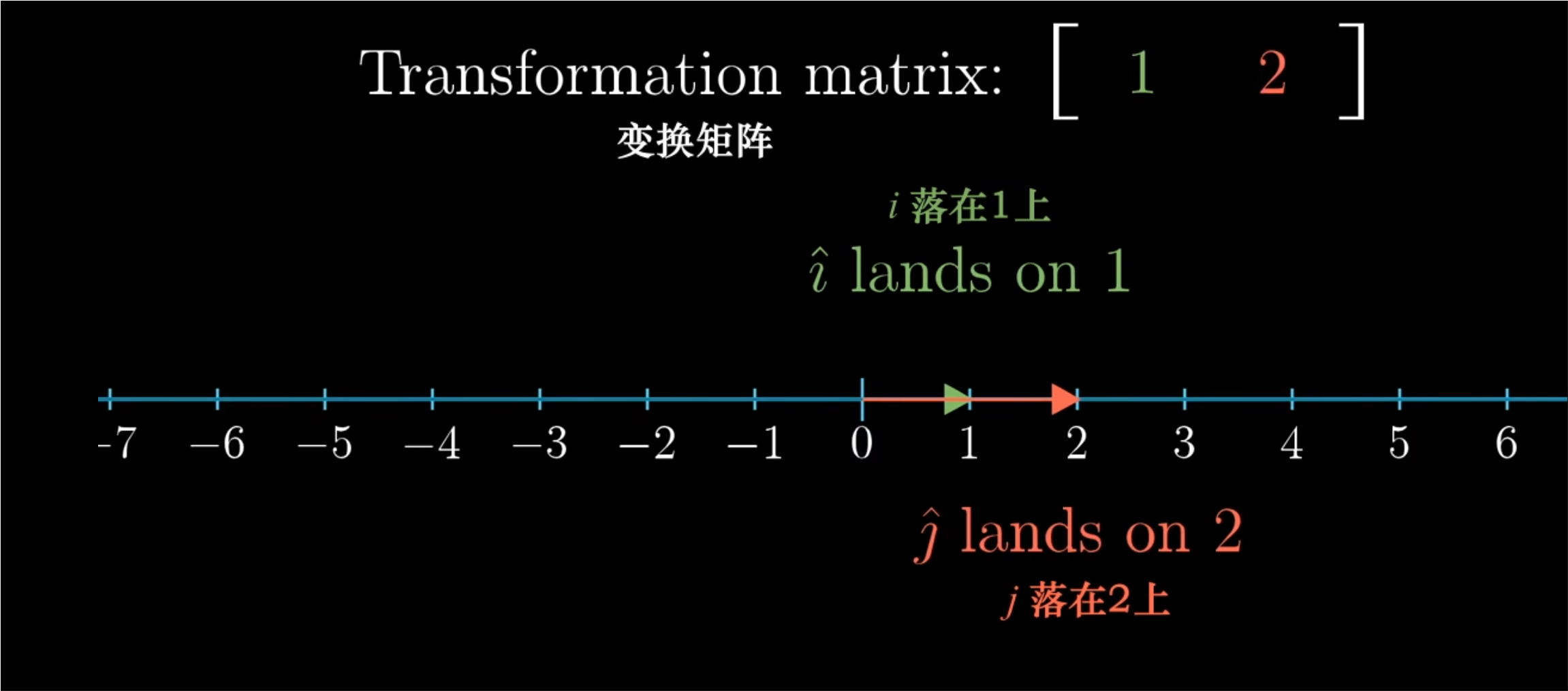
- 除此以外,当然还可以由二维空间到一维空间的转换,一维空间实际上就是数轴。
- 这里可以理解为如果一条直线上有一系列等距分布的点,在映射到数轴之后,他们将保持等距分布,这样的变换也可以用一个1x2矩阵表示,而这个矩阵的两列都只有一个数,这两列分别代表了变换后的基向量。
- 实际上这是一类非常有意义的变换,它与点积紧密相关。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 ZeTiiCannotStop!
相关推荐
评论